
IPEXCO: A Platform for Iterative Planning with Interactive Goal-Conflict Explanations
Published:
Summary
This is a demo paper about a platform for iterative planning with interactive goal-conflict explanations. My most notable contribution is the design of a multi-agent LLM architecture to present explanations to users through a chat interface.
Abstract
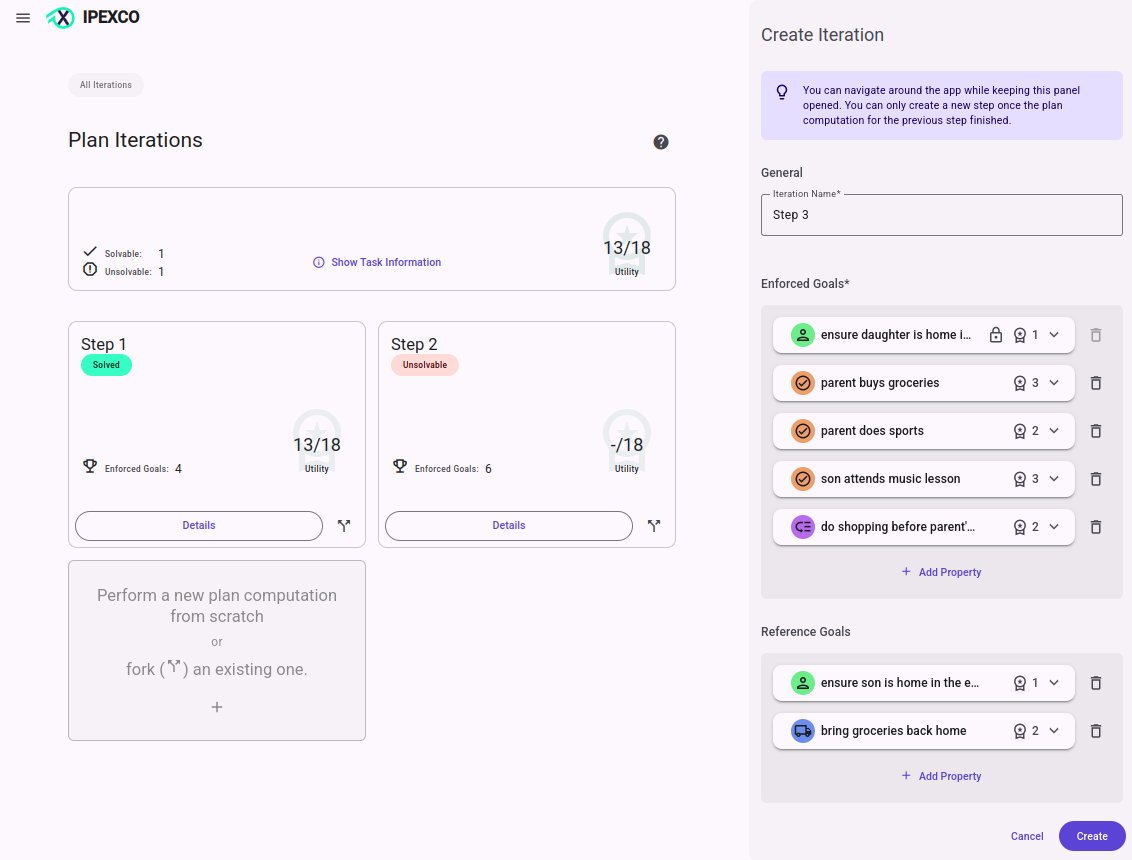
When automating plan generation for a real-world sequential decision problem, the objective is often not to replace the human planner, but rather to facilitate an iterative reasoning and elicitation process, where the human’s role is to guide the planner according to their preferences and expertise. In this context, explanations that address users’ questions are crucial to improve their understanding of potential solutions and increase their trust in the system. We present a platform that implements this iterative planning approach and provides explanations to user questions based on conflicting goals and preferences. The platform supports both a classical template-based interface and a multi-agent Large Language Model (LLM) architecture that enables interactive explanations tailored to the user and context. The integration of online user studies allows for the evaluation of the effectiveness of the explanations and the impact of the communication interface.
Click here to download the paper
Recommended citation:
@inproceedings{
fouilhe2025conversational,
title={Conversational Goal-Conflict Explanations in Planning via Multi-Agent {LLM}s},
author={Guilhem Fouilh{\'e}, Rebecca Eifler, Sylvie Thiebaux, Nicholas Asher },
booktitle={AAAI 2025 Workshop LM4Plan},
year={2025},
url={https://openreview.net/forum?id=Ys875Rgl4o}
}
–>