Hi! I am Guilhem Fouilhé, a PhD student at IRIT and member of the
MELODI team.
I am also part of ANITI, one of the French AI clusters in Toulouse.
AI researcher and engineer finishing a PhD on explainability and interpretability of large language models and AI planning.
I build data-driven AI applications end to end, from research prototypes to deployed interactive tools, pairing a strong
mathematical foundation with hands-on engineering.
I have a strong background in mathematics and computer science which first guided me towards theoretical aspects of AI.
I have since learned a lot about practical aspects and am now building increasingly realistic and useful systems.
Outside of research, I enjoy spending time outdoors in wide open spaces near the Pyrenees and travelling to learn about
different cultures and ways of life.
Research
Explainability and interpretability of LLMs, agentic systems, and AI planning — with a focus on interactive, conversational explanations.
Interactive XAI
I explore conversational approaches to explanations, taking inspiration from how humans explain to each other.
My work formalizes and implements LLM-based interfaces that let users ask questions and refine their understanding.
Planning & Symbolic AI
I study the intersection of machine learning and symbolic approaches, improving explainability in automated planning
within the TUPLES EU project.
LLM Capabilities
I investigate the capabilities and limitations of large language models — in-context learning, multi-agent architectures,
and the guarantees needed to use them safely in critical applications.
Experience
Research and industry internships across explainability, deep learning, and applied mathematics.
2023 – Present
Doctoral Researcher
IRIT & ANITI, Université de Toulouse
Explaining complex AI models interactively and approximately: explainability and interpretability of LLMs and automated planning.
Advisors: Nicholas Asher and Philippe Muller. Funded by the EU project
TUPLES.
2023 (6 months)
Research Intern
IRT Saint Exupéry
Supervisors: David Vigouroux and Agustin Picard.
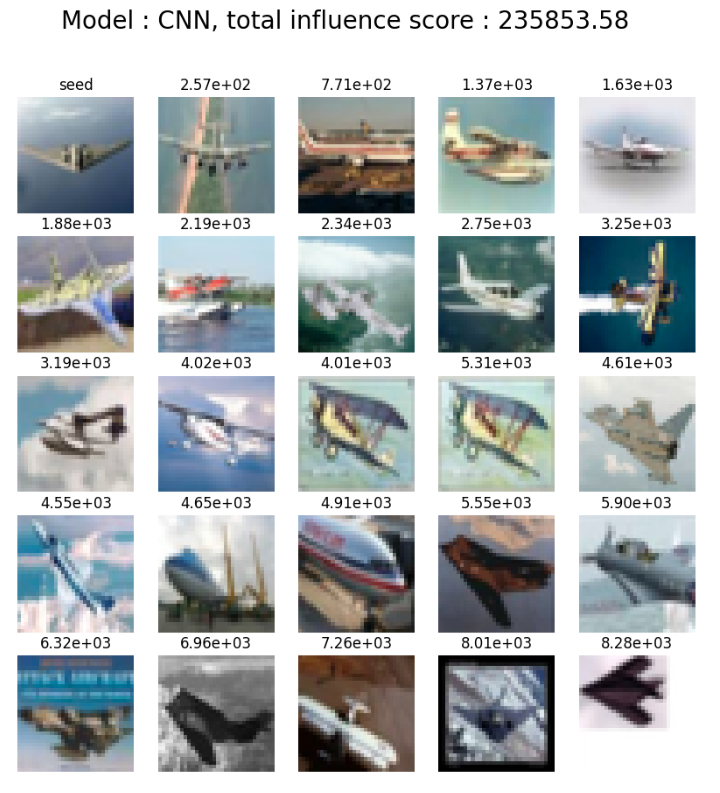
Influence functions for global explainability of deep neural networks.
Report
2022 (3 months)
Research Intern
CerCo – CNRS (funded by ANITI)
Supervisors: Grégory Faye and Rufin VanRullen.
Mathematical models for predictive coding in vision. Theoretical and applied study of stability of predictive coding DNNs (PyTorch).
Publication
2021 (2 months)
Research Intern
IMT – Institut de Mathématiques de Toulouse (funded by CIMI)
Supervisors: Grégory Faye and Christophe Besse.
Sharp thresholds for bistable reaction–diffusion equations. Theoretical and numerical study of asymptotic behavior.
Publication
Valedictorian (major de promotion), with honours. ANITI Graduate School Fellowship (M1 and M2).
2017 – 2021
B.Sc. in Mathematics
Université de Montpellier
First two years as a Mathematics–Physics double major. With honours.
Publications
Peer-reviewed papers, preprints, and academic reports. Click to expand abstracts and citations.
Research Publications
Exploring Plan Space through Conversation: An Agentic Framework for LLM-Mediated Explanations in Planning
EUMAS 2026 (23rd European Conference on Multi-Agent Systems), 2026
We formalize, implement and test on users an LLM-based conversational explanation interface for planning.
Abstract & links
Summary
We formalize and implement an LLM-based conversational explanation interface for planning, and test it with a user study.
Abstract
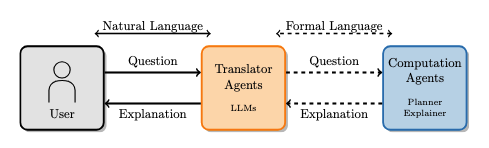
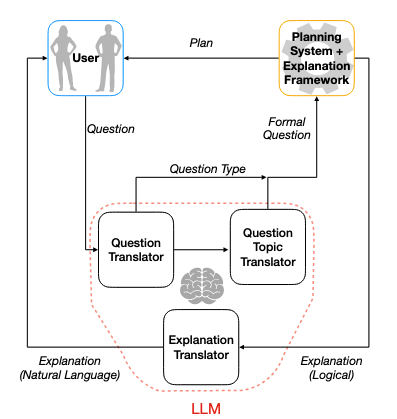
When automating plan generation for a real-world sequential decision problem, the goal is often not to replace the human planner, but to facilitate an iterative reasoning and elicitation process, where the human’s role is to guide the AI planner according to their preferences and expertise. In this context, explanations that respond to users’ questions are crucial to improve their understanding of potential solutions and increase their trust in the system. To enable natural interaction with such a system, we present a multi-agent Large Language Model (LLM) architecture that is agnostic to the explanation framework and enables user- and context-dependent interactive explanations. We also describe an instantiation of this framework for goal-conflict explanations, which we use to conduct a user study comparing the LLM-powered interaction with a baseline template-based explanation interface.
IPEXCO: A Platform for Iterative Planning with Interactive Goal-Conflict Explanations
World Conference of Explainable AI 2025, 2025
A Platform for Iterative Planning with Interactive Goal-Conflict Explanations.
Abstract & links
Summary
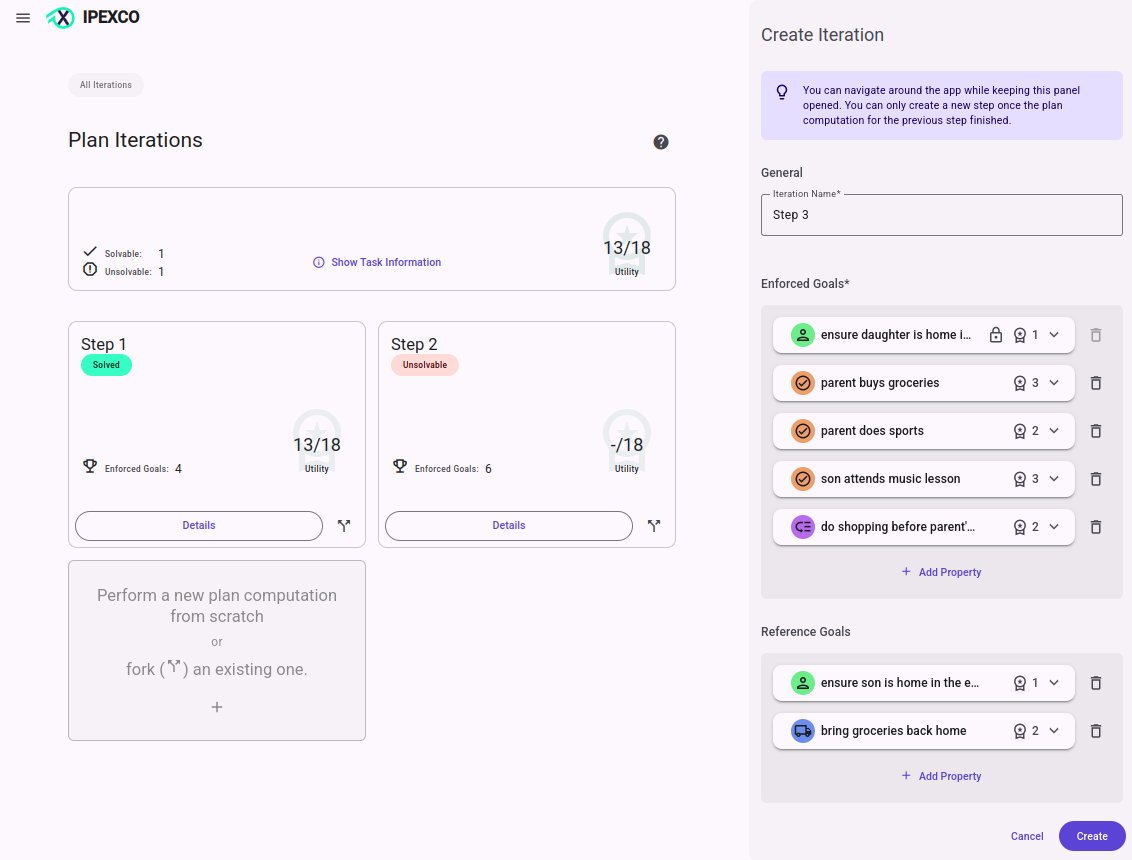
This is a demo paper about a platform for iterative planning with interactive goal-conflict explanations.
My most notable contribution is the design of a multi-agent LLM architecture to present explanations to users through a chat interface.
Abstract
When automating plan generation for a real-world sequential decision problem, the objective is often not to replace the human planner, but rather to facilitate an iterative reasoning and elicitation process, where the human’s role is to guide the planner according to their preferences and expertise. In this context, explanations that address users’ questions are crucial to improve their understanding of potential solutions and increase their trust in the system. We present a platform that implements this iterative planning approach and provides explanations to user questions based on conflicting goals and preferences. The platform supports both a classical template-based interface and a multi-agent Large Language Model (LLM) architecture that enables interactive explanations tailored to the user and context. The integration of online user studies allows for the evaluation of the effectiveness of the explanations and the impact of the communication interface.
Conversational Goal-Conflict Explanations in Planning via Multi-Agent LLMs
Workshop on Planning in the Era of LLMs (LM4Plan @ AAAI 2025), 2025
We formalize and implement an LLM-based conversational explanation interface for planning.
Abstract & links
Summary
We formalize and implement an LLM-based conversational explanation interface for planning.
Contribution
This is my first first-author paper!
Abstract
When automating plan generation for a real-world sequential
decision problem, the goal is often not to replace the human
planner, but to facilitate the tedious work. In an iterative pro-
cess, the human’s role is to guide the planner according to
their preferences and expert experience. Explanations that re-
spond to users’ questions are crucial to increase trust in the
system and improve understanding of the sample solutions.
To enable natural interaction with such a system, we present
an explanation framework agnostic architecture for interac-
tive natural language explanations that enables user and con-
text dependent interactions. We propose conversational inter-
faces based on Large Language Models (LLMs) and instan-
tiate the explanation framework with goal-conflict explana-
tions. As a basis for future evaluation, we provide a tool for
domain experts that implements our interactive natural lan-
guage explanation architecture.
KI 2025: Advances in Artificial Intelligence, 2024
We challenge the prevailing narrative about how transformers learn linear functions in-context by exploring a simple controlled setup with synthetic data.
Abstract & links
Summary
We investigate how transformer models learn linear functions through in-context learning, challenging common assumptions about their algorithmic capabilities.
Contribution
This work provides new insights into the limitations of in-context learning by studying a controlled setup with synthetic data.
Abstract
We explore in-context learning (ICL), a popular paradigm for inference with Large Language Models (LLMs), in a controlled experimental setup using synthetic training data. Using a range of small transformer models trained from scratch, we focus on a mathematical task with simple yet precise prompts: learning a linear function f from a sequence of inputs and their corresponding function values . Our findings challenge the prevailing narrative that transformers adopt algorithmic approaches like linear regression to in-context learn (ICL) a linear function. We observe that all models have “boundary values” that limit generalizability. While we can extend boundary values with training distributions over a wider range, we lose the precision of models trained on distributions with more restricted ranges. Thus, we see a dilemma for ICL at least in some tasks: either models will lack generalizability or precision.
Mathematical Derivation of Wave Propagation Properties in Hierarchical Neural Networks with Predictive Coding Feedback Dynamics
Bulletin of Mathematical Biology, 2023
We present a mathematical framework to systematically investigate neural dynamics in a hierarchical perceptual system with predictive coding.
Abstract & links
Summary
We present a mathematical framework to systematically investigate neural dynamics in a hierarchical perceptual system, showing how stability and wave propagation properties emerge from predictive coding principles.
Contribution
This paper provides a rigorous mathematical analysis of hierarchical neural networks with predictive coding dynamics, revealing conditions for stability and characterizing wave propagation properties.
Abstract
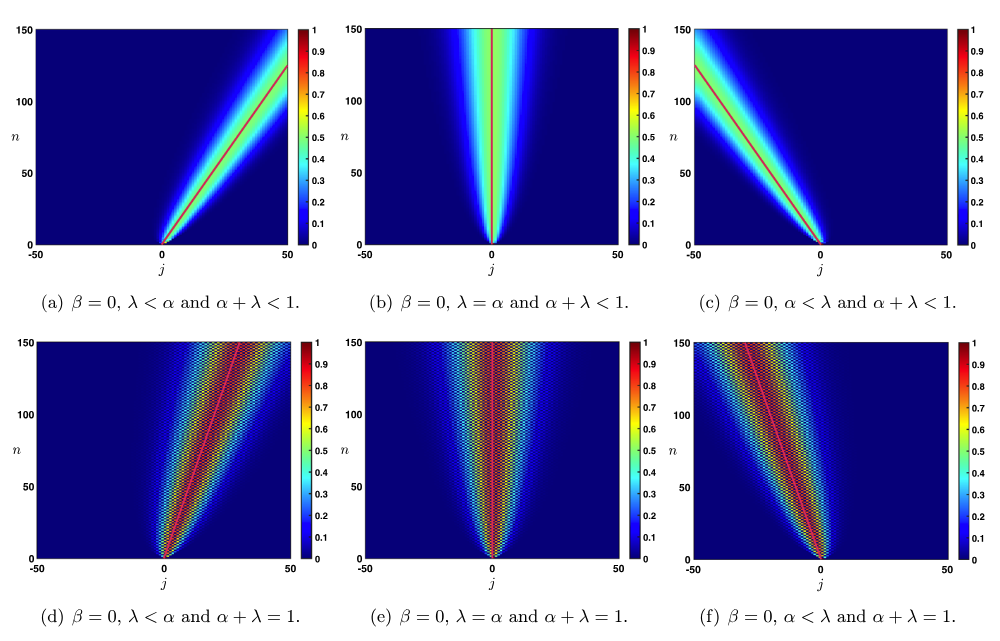
Sensory perception (e.g., vision) relies on a hierarchy of cortical areas, in which neural activity propagates in both directions, to convey information not only about sensory inputs but also about cognitive states, expectations and predictions. At the macroscopic scale, neurophysiological experiments have described the corresponding neural signals as both forward and backward-travelling waves, sometimes with characteristic oscillatory signatures. It remains unclear, however, how such activity patterns relate to specific functional properties of the perceptual apparatus. Here, we present a mathematical framework, inspired by neural network models of predictive coding, to systematically investigate neural dynamics in a hierarchical perceptual system. We show that stability of the system can be systematically derived from the values of hyper-parameters controlling the different signals (related to bottom-up inputs, top-down prediction and error correction). Similarly, it is possible to determine in which direction, and at what speed neural activity propagates in the system. Different neural assemblies (reflecting distinct eigenvectors of the connectivity matrices) can simultaneously and independently display different properties in terms of stability, propagation speed or direction. We also derive continuous-limit versions of the system, both in time and in neural space. Finally, we analyze the possible influence of transmission delays between layers, and reveal the emergence of oscillations.
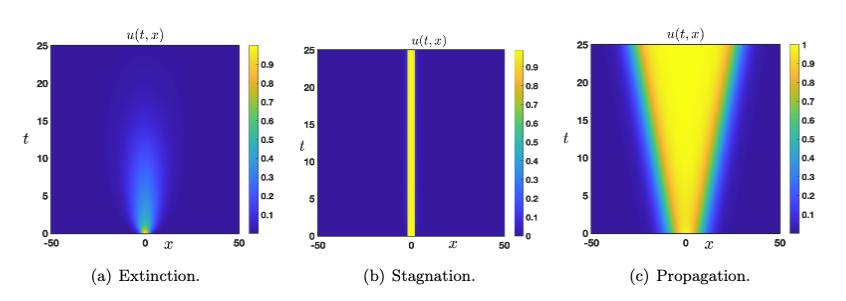
Asymptotic behavior of nonlocal bistable reaction-diffusion equations
Discrete and Continuous Dynamical Systems - Series B, 2022
We study the asymptotic behavior of nonlocal bistable reaction-diffusion equations.
Abstract & links
Summary
We study the asymptotic behavior of nonlocal bistable reaction-diffusion equations.
Abstract
In this paper, we study the asymptotic behavior of the solutions of nonlocal bistable reaction-diffusion equations starting from compactly supported initial conditions. Depending on the relationship between the nonlinearity, the interaction kernel and the diffusion coefficient, we show that the solutions can either: propagate, go extinct or remain pinned. We especially focus on the latter regime where solutions are pinned by thoroughly studying discontinuous ground state solutions of the problem for a specific interaction kernel serving as a case study. We also present a detailed numerical analysis of the problem.
Travaux d’Initiation à la Recherche, Université Paul Sabatier, 2022
A university project review of a brain-inspired algorithm applied to deep neural networks.
Details
Summary
We review the application of predictive coding - a popular neuroscience framework - to deep neural networks.
Contribution
This work was produced for TIR (Travaux d’Initiation `a la Recherche) course in M1 Computer Science of UPS during year 2021/2022.
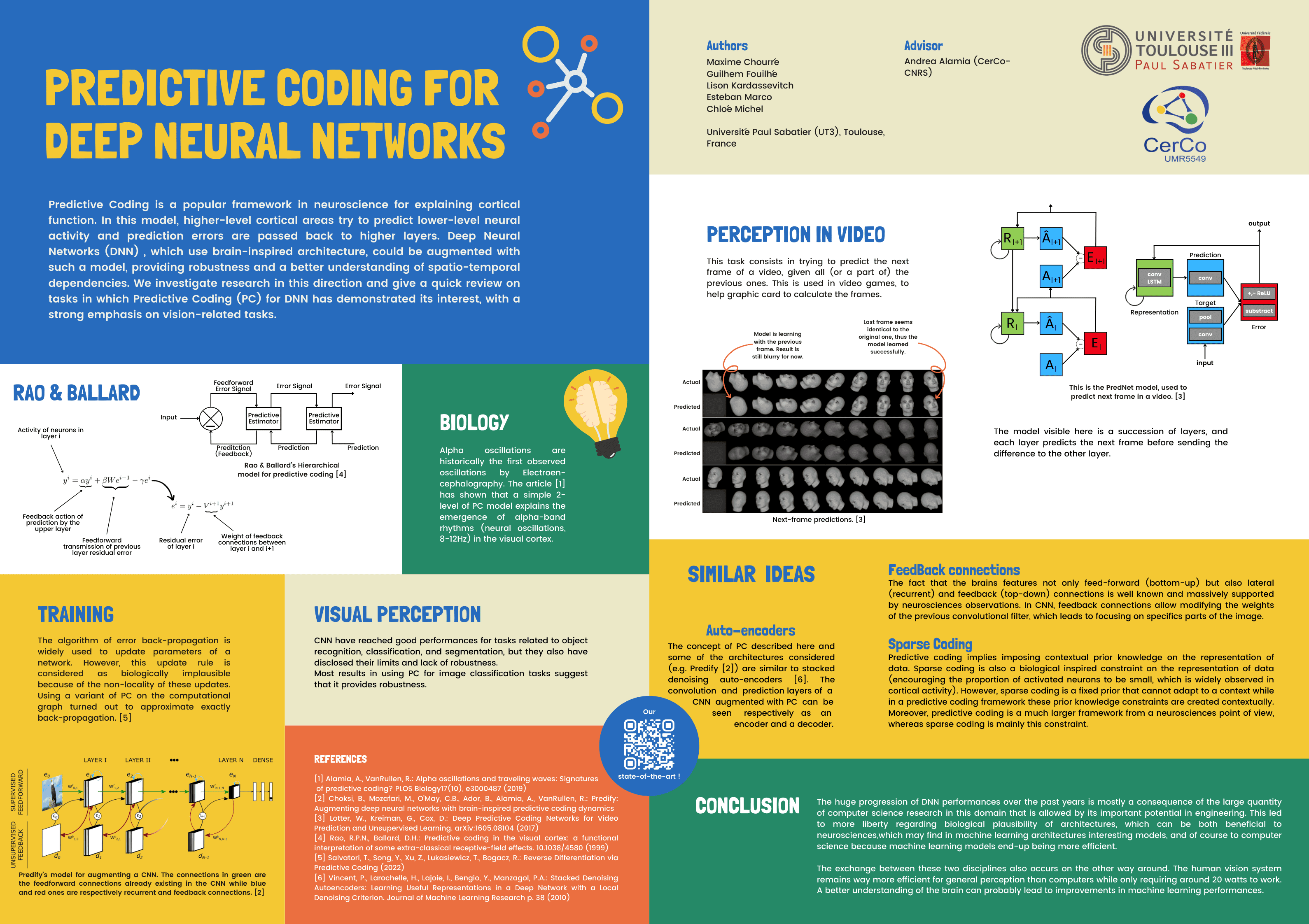
Abstract
Predictive Coding is a popular framework in neurosciences for explaining cortical function. In this model, higher-level cortical areas try to predict lower-level neural activity and prediction errors are passed back to higher layers. Deep Neural Networks (DNN) , which use brain-inspired architecture, could be augmented with such a model, providing robustness and a better understanding of spatio-temporal dependencies. We investigate research in this direction and give a quick review on tasks in which Predictive Coding (PC) for DNN has demonstrated its interest, with a strong emphasis on vision-related tasks.
Research prototypes and full-stack AI applications, from LLM pretraining to deployed interactive tools.
2026
SSA-Luciole-1B
Pretraining a billion-parameter state-of-the-art LLM from scratch. HPC GPU training and evaluation with PyTorch Lightning, Nvidia NeMo, Hugging Face, and custom Triton kernels.
PyTorch LightningNeMoHugging FaceTriton
2025
IPEXCO
Platform for iterative planning with interactive goal-conflict explanations. Full-stack development with conversational LLM-based explanations for automated planning.
Lectures, tutorials, and lab sessions for undergraduate (L1–L3) and graduate (M1) students at
Université Toulouse III – Paul Sabatier and UPSSITECH engineering school.
Advanced Algorithmics
Université Paul Sabatier · 2025 · KINX7AC1
Databases
Université Paul Sabatier · 2025 · KINFD60U
Algorithms 2
Université Paul Sabatier · 2025 · KINXPA21
Advanced Programming
UPSITECH · 2024 · KUPR7AB3
AI - Machine Learning and Deep Learning
UPSITECH · 2024 · KUPR8AB2
Object-Oriented Programming
Université Paul Sabatier · 2024 · KMIAPF41
Functions and Calculus 4
Université Paul Sabatier · 2024 · KMAXPF07
Set Theory 1
Université Paul Sabatier · 2024 · KMAXPF03
Artificial Intelligence
Université Paul Sabatier · 2024 · KINXPD51
Artificial Intelligence
UPSITECH · 2024 · KINUPG11
Data Structures
Université Paul Sabatier · 2023 · KMIXID11
Outreach
I co-authored a national online module,
“Identifier les possibilités d'utilisation des IA génératives textuelles”,
for the French Université Numérique.
This module, accessible to all students in France, explores the potential uses of generative AI in academic settings.
My role was to explain how ChatGPT and similar models function.
Awards & Service
Awards & Funding
ANITI Graduate School Fellowship (Master’s, M1 and M2, 2021–2023) Valedictorian of the M.Sc. in Computer Science & Mathematics for AI (2023)
Competitive research internship grants from CIMI and ANITI (2021, 2022)
Academic Service & Leadership
PhD & Postdoc Representative, ANITI (2024–present) —
Organize seminars, workshops, and social events for the AI cluster’s early-career researchers.
Scientific Evaluator, Airbus Beluga AI Challenge — Explainability Track (2025).
Invited talks at LAAS-CNRS and IRT Saint Exupéry.
Also attended LxMLS 2024 summer school (Lisbon) and TUPLES project meetings across Europe (Prague, Saarbrücken, Leuven).
Student governance (Montpellier, 2018–2021). President of the student union
AGEM (2019–2020):
led a 15-person team representing 75,000+ students; elected to university, faculty, and CROUS councils.
Key achievements: city’s first student social grocery store, inclusive 2020 mayoral debate (11/14 candidates),
increased funding for campus projects.
Le bureau de l’association des étudiants de Montpellier aux fêtes du VIème centenaire de Ernest Michel, 1892
News
June 2026: Accepted paper “Exploring Plan Space through Conversation” at EUMAS 2026 (proceedings forthcoming)
June 2026: Accepted communication at JCAD 2026 in Nantes, France
March 2026: Mesochallenge on Kairos to test their new AI cluster
July 2025: Attended XAI 2025 in Istanbul to present IPEXCO
June 2025: Accepted paper on ICL of linear functions by LLMs at KI 2025
May 2025: Participated in Les Doctoriales de Cahors
April 2025: Accepted Demo paper at XAI 2025 in Istanbul
April 2025: Scientific Evaluator for the Beluga AI Challenge — Explainability Track
March 2025: Talk at the FOR project at IRT Saint Exupéry
February–March 2025: AAAI 2025 in Philadelphia to present “Conversational Goal-Conflict Explanations via Multi-Agent LLMs”
February 2025: Talk at LAAS-CNRS in Toulouse
December 2024: Accepted as Oral paper at AAAI 2025 Workshop on Planning at the Era of LLMs
November 2024: TUPLES Meeting at CVUT in Prague
July 2024: LXMLS Summer School in Lisbon
April 2024: TUPLES Meeting at USaar in Saarbrücken
November 2023: TUPLES Meeting at KUL in Leuven
October 2023: Started PhD at IRIT, Toulouse
Contact
Open to research and applied AI roles from late 2026. The easiest way to reach me is by email.